
Reducing the Weight of a Robot Actuator
A metal additive manufacturing process reduced the weight of a hydraulic actuator, leading to a better performing component.

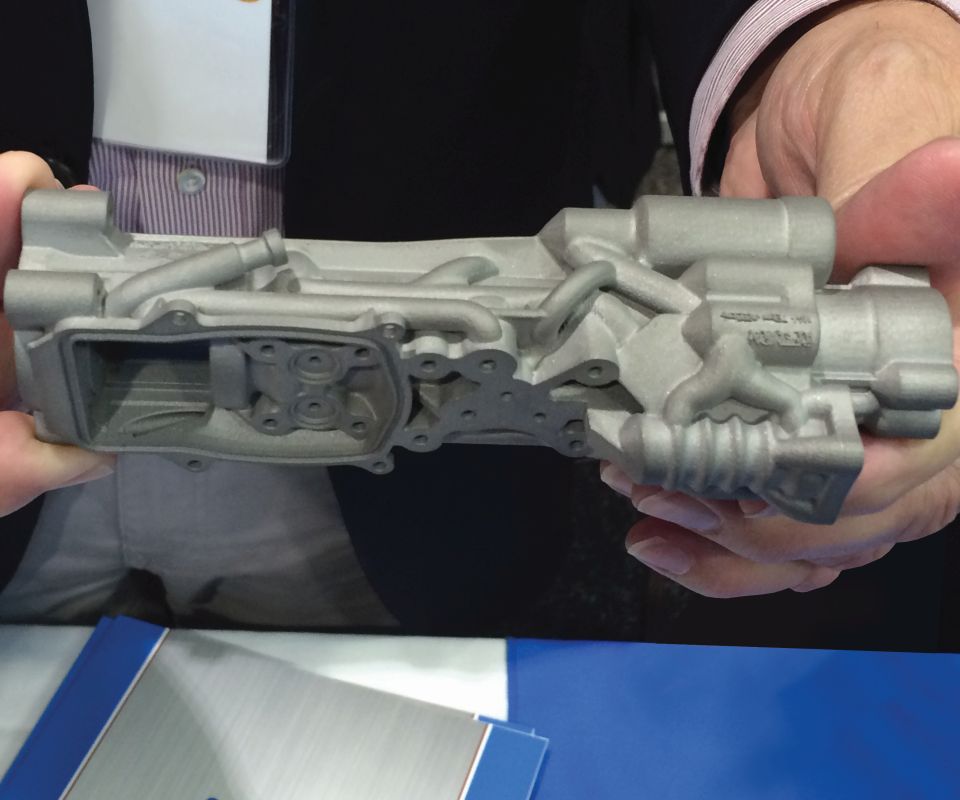
This electronic actuator was grown in a powder-bed additive manufacturing system. Design features such as its curved flow tubes would not have been possible using traditional manufacturing techniques.

The actuator is used in the legs of this hydraulic quadruped robot developed by the Italian Institute of Technology in Genoa.



This highly integrated electronic actuator for a hydraulic quadruped robot needed to meet design requirements while achieving a 50 percent weight reduction, compared to a traditionally manufactured actuator body.
A powder-bed metal additive manufacturing process called selective laser melting (SLM) allowed it to be made as one piece. The part was grown layer by layer in Ti6Al4V (titanium alloy) on a Renishaw AM250 industrial 3D printer at the Moog Additive Manufacturing Center (now part of Linear AMS).
The new actuator’s one-piece construction reduces manufacturing operations, improves performance through design features such as curved flow tubes that eliminate right-angle drilling, and reduces weight as a result of downsizing. Traditional manufacturing would have entailed combining the cast and fabricated pieces with brazing and welding operations.
This particular actuator is used on each leg of a quadruped robot developed at the Italian Institute of Technology in Genoa, where it was designed initially for military applications. However, a similar actuator concept can also be used in many other applications, for example: heavy equipment, such as tractors and large earth-moving equipment, for weight and size reduction; military and commercial aircraft, to control velocity and engine speed by adjusting levers and flaps; and injection-molding applications for exact precision control.
Related Content
-
Niche Work If You Can Get It: A CNC Machine Shop Crafts Its Own Destiny
The latest innovations in metalworking aren’t always related to CNC automation or robotics. For Rosenberger North America, a 2022 Top Shops Honoree, it is the company’s niche processes that create the biggest successes.
-
Modern Bar Feeds Bring New Life to Automatic Swiss Lathes
Cam-actuated Swiss lathes are still the fastest way to process many parts. By adding modern bar feeders, this shop has dramatically improved their utilization with the ability to work unattended, even in a lights-out environment.
-
Weiler to Debut New Automation Features For Its Lathes
Weiler’s V 110 four-way precision lathe introduces features new to the U.S.








