
Video: Robot Gripping by Granular Compression
An alternate approach to robot gripping readily conforms to the shape of many different target objects.
.jpg;width=70;height=70;mode=crop;format=webp)



A typical industrial robot has a form and function suggestive of a human arm. Does that mean the robot gripper ought to work like human fingers or a human hand?
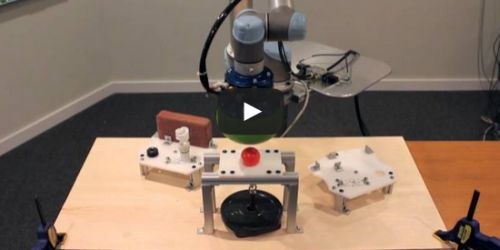
This video demonstrates an alternate concept for robot gripping. The “Versaball” from Empire Robotics uses the compression of granular material to achieve its gripping force. This demonstration of the gripper on a robot arm from Universal Robots illustrates the strength, precision and control of the grip, not to mention its versatility, by lifting and relocating objects including a weight, a brick and a light bulb.
Related Content
-
Using the Toolchanger to Automate Production
Taking advantage of a feature that’s already on the machine tool, Lang’s Haubex system uses the toolchanger to move and store parts, making it an easy-to-use and cost-effective automation solution.
-
Beyond the Machines: How Quality Control Software Is Automating Measurement & Inspection
A high-precision shop producing medical and aerospace parts was about to lose its quality management system. When it found a replacement, it also found a partner that helped the shop bring a new level of automation to its inspection process.
-
Niche Work If You Can Get It: A CNC Machine Shop Crafts Its Own Destiny
The latest innovations in metalworking aren’t always related to CNC automation or robotics. For Rosenberger North America, a 2022 Top Shops Honoree, it is the company’s niche processes that create the biggest successes.








