
Rethinking Robot Anatomy
Actuator-based models offer alternative robot designs.
Share









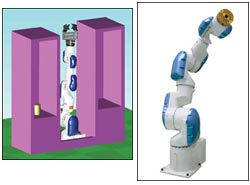
The snake-like movement of this seven-axis robot allows it to load and unload machine tools while occupying little floorspace. The rendering illustrates a configuration in which the robot could load and unload two machines and still leave the floorspace in front of both of them unrestricted.
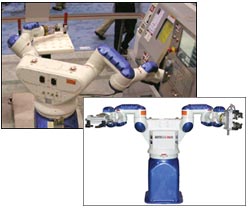
This robot has two independent arms that can perform separate tasks or work together. The two arms working in unison can speed the load/unload cycle, and they can also simplify the gripper design in applications where two workpieces need to be held at once. The upper photo shows the robot simultaneously unloading one part and grabbing the next part to be loaded.
We all know what an industrial robot looks like. It looks vaguely like a human arm. That is, the typical robot used in a machine shop’s machine tending application has pivots near the base that work somewhat like a human shoulder, a pivot along the length that resembles an elbow and a pivot near the gripper that resembles a wrist. The design also has two long links in the way that a human has an upper and lower arm. A study of our own limbs, it seems, influenced the design of these machines.
However, a robot doesn’t have to look this way. A couple of models from robot supplier Motoman (West Carrollton, Ohio) illustrate alternatives.



The images at left show a seven-axis robot that uses actuator-driven motion. With the seven axes of programmable motion, and with the shorter links, this robot moves more like a snake or tentacle as opposed to a human arm. Standing upright, this robot occupies a footprint just slightly larger than 1 square foot. In fact, it can stand in this footprint close beside a machine tool—or close between two machines—and snake around into the machine’s work zone as needed. This configuration leaves the floor space fully open both in front of the machine and behind it.
The use of actuators permits such a compact form. An actuator is a motion-control device that integrates motor, encoder, reducer and brake into a single body. Normally, these would be separate elements of the robot design, and an important advantage of this established design is power. Robots with separate motors can handle very heavy parts. By contrast, the limitation on the actuator-based robot is how much torque an actuator can deliver. The actuator-based robot is therefore flexible, compact and unobtrusive, but at present it is limited to payloads of 20 kg.
Another actuator-based robot is the dual-arm robot shown on the next page. This 13-axis robot has two six-axis arms, and it works within a footprint comparable to the working space of a human being. In fact, this robot arguably does resemble a human being—except that its two arms work independently in ways no human’s two arms ever could.
Having two independently programmable arms on a robot can dramatically simplify a machine-tending application, because many such applications require complex dual-gripper mechanisms to let a single arm exchange two parts quickly. With two arms working together, simple grippers can accomplish the same quick exchange.
Tom Sipple is the handling products technology leader for Motoman. He says that he and other engineers like him are working to better understand all of the applications in which a dual-arm robot might be applied more effectively than a single arm. Conventional robots are well accepted now, but he predicts that in 10 years, dual-arm robots will also be commonplace. He says one clue that a dual-arm robot may be appropriate in a machining application is when the robot itself is the limiting factor on the cycle time of the overall process. He offers these examples of machine-tending applications where dual-arm robots have proven to be effective:
- Loading a transfer machine. On a high-volume, high-productivity machine such as a dial index machine, the two arms can work simultaneously to unload the finished part while loading the next blank.
- Loading related machines. With the robot between two machine tools (a lathe and a machining center, for example), arm number 1 can hand off the partially machined part to arm number 2. Arm 2 can then load that part in the second machine while arm 1 goes to load the next unmachined part in the first machine.
- Deburring or inspection. While the robot waits for a machining cycle to finish, the two arms can work together to perform a simple operation on a part that has just been machined. Specifically, one arm can hold the part while the other uses a deburring tool or a gage.
- Quick part exchange in small machines. The work zones of some machine tools are so restricted that they don’t even offer clearance for dual-gripper devices on a single arm. For machines such as these, dual arms introduce a way to unload one part and load the next part in a significantly shorter span of time.

.png;maxWidth=300;quality=90;format=webp)










Related Content

Revolutionizing Production: How Smart Hydraulics Drive 24/7 Manufacturing Excellence
All World Machinery Supply helps a firearms manufacturer up its game and improve and increase output.
Read More
Studer's Automation, Entry-Level Solutions Take Center Stage
At its 2024 Music Motion Meeting, Studer AG showed off its entry-level line of grinding machines, as well as its newest universal loading system.
Read More
Embracing Automation: Strategies for Small to Medium-Sized Machine Shops
Business drivers for automating to help navigate workforce challenges and boost profitability.
Read More
Increasing Productivity with Digitalization and AI
Job shops are implementing automation and digitalization into workflows to eliminate set up time and increase repeatability in production.
Read More