
Share










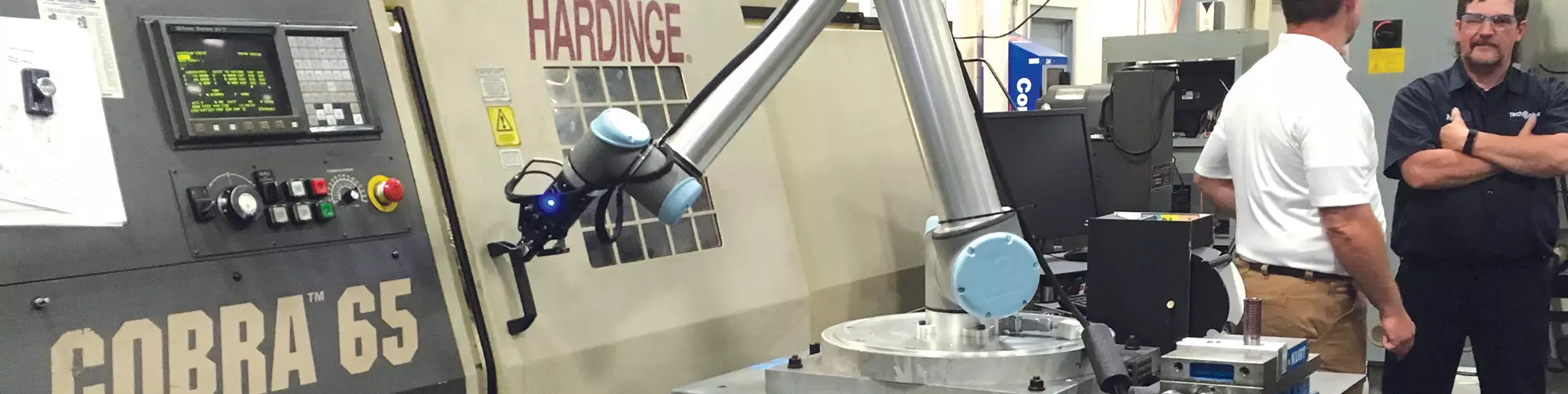
A collaborative robot or “cobot” is a robot that is safe to run unguarded near people. Most cobots are safe because they are speed- and force-limited, and they stop upon sensing contact with an obstacle. Cobots are also easy to relocate and reprogram for different tasks in a shop. This cobot was photographed at a robotics event late last year year at TechSolve in Cincinnati, Ohio. The cobot here not only loads and unloads the machine tool, but also closes the door and presses cycle start.
In machining facilities today, automation applications tend to call for robots that are powerful and perilous. That is, robots with a high payload and high speed, typically fixed in one place and operating behind a safety fence. By contrast, collaborative robots (cobots) are designed to be easily redeployable and safe for use near people, but this generally makes them payload-limited and slow to an extent that limits the machining jobs where they can succeed.
However, cobots are coming. Specifically, they are coming in increasing numbers to CNC machining applications.



1. Cobots, vision and AI all go together.
The three technologies in the name of the CRAVAI event are not an arbitrary list aimed at filling the agenda. Instead, machine vision plus AI will solve important challenges with robots in general and cobots in particular. One of them is this: The gripper or end effector in a robot application is a complex component that often has to be customized to suit the job. The problem is worse with cobots, because the end effector might bring safety hazards that ruin the robot’s ability to collaborate. However, vision in combination with AI promises to enable a robot to analyze the shape of an object to take hold of it using just a general-purpose gripper. This is what we humans do, after all: We use vision plus intelligence to guide our own general-purpose gripping hands.
Powerful interests are helping to motivate this technology development. Amazon, in its warehouse applications, would benefit significantly from robots being able to quickly and accurately grasp a variety of objects using a single, unchanging gripper.
2. Cobots do not guarantee safety.
As suggested, the gripper or end effector is a component that could impose safety hazards canceling out the cobot’s collaborative nature. An oft-repeated line at this conference noted that a cobot is not collaborative if it is wielding a knife or torch. Procter and Gamble robotics lead Robert Bollinger has thought a lot about this. He helped to develop a cobot-based palletization system that has been replicated and deployed at sites throughout the company. “It’s not just a cobot; it’s a system,” he notes. Ensuring operator safety in the palletization system entailed not just specifying a cobot, but also padding the gripper and the potential areas of contact, such as the cobot’s elbow, where an operator stooping to pick up boxes might hit his or her head.
3. Cobot applications need not feature collaboration.
Dan Burseth, vice president of automation solutions provider Eckhart Inc., offered some insights about where cobots are succeeding today. “Cobots are cheap, easy to set up and program, and small,” he says. This is frequently why they are used. Safety need not be a factor. While cobots are engineered to work safely alongside people, this “collaboration” often does not figure into their successes.
4. Automation’s payback period is declining.
Mr. Burseth also notes how, in addition to providing opportunities for low-cost automation, declines in cobot price has made their application more economical still. Meanwhile, wages for manufacturing employees have increased. These moves together make cobot automation more attractive by reducing its payback time.
5. Trends in manufacturing favor collaboration.
Patrick Sobalvarro of Veo Robotics offered a counterpoint to this. He noted how the increased incidence of design and product change in manufacturing means some automation applications can never achieve payback from one product alone. Therefore, automation needs to be redeployable, and in cases in which the process change is so frequent that human involvement is needed, the automation solution needs to be collaborative. Trends toward mass customization and faster product cycles favor cobots, and these trends are perhaps the chief reason why more of them will be coming.
6. Cobot adoption might be held back by lack of people.
One more point from Mr. Burseth is counterintuitive: While we generally assume the lack of people to be an enabler and justification for automation, this lack can go too far where cobots are concerned. This type of automation is still a new idea to many manufacturers, and manufacturing facilities today are often too lightly staffed to be able to effectively explore new ideas. Thus, the lack of people with whom to collaborate is holding back the adoption of collaborative robots. It turns out that it takes a certain minimum number of people to explore the ways to overcome a lack of people.
7. Advancing AGV technologies make cobots mobile.
Another speaker, Mov.ai founder Limor Schweitzer, discussed various technology advances affecting automated guided vehicles (AGVs). He noted that more precise rotary actuators enable these devices to achieve precise physical positioning. Augmented-reality technology related to inferring 3D space has had the side benefit of addressing challenges in AGV navigation, and better wireless data speeds enable better control. These performance improvements make the AGV a fitting platform for a cobot, he notes. His company anticipates the spread of this idea. Mov.ai’s product is a third-party software operating system for mobile cobots enabling them be supplied more cheaply.
8. Attention recognition is coming.
One of the weirdest presentations at CRAVAI was from Eyeware, a company working on attention recognition for automation. Vision systems employing eye tracking can measure human intent by inferring what a person is looking at. As a result, in the future, automation might be able to answer the ambiguous question, “What is that?” because it will know what the speaker is looking at. Applied to manufacturing, attention recognition could help cobots be even more collaborative, enabling them to anticipate the human worker’s next move and pre-position the part or tool the worker will need next.
9. Collaborative can be done in different ways.
When I imagine a cobot, I think of a force- and speed-limited robot—a robot moving with too little power to hurt me , and one that will stop if that will stop if it makes contact . However, there is another way to do collaborative. The previously mentioned Veo Robotics is developing technology for speed and separation monitoring. The combination of vision plus AI (back to point 1) produces a system that can recognize a human coming close to the robot, calculate that human’s potential to make contact, and slow or stop the robot as needed. With this system, robots can be fast and powerful, but still collaborative. We will not necessarily think of cobots as small and weak anymore.
10. “Collaborative” can be a bigger idea.

Advances in the precision and capability of AGVs have made them increasingly effective platforms for cobots. This mobile cobot was photographed at the EMO trade show in Germany. Watch this cobot in action.
As Veo’s Sobalvarro points out, the speed and separation monitoring via vision and AI is an idea that is bigger than robots. Potentially any programmed machinery could be made collaborative in this way. Past a certain point, the continued advance of collaborative robots will bring us beyond robots to automation throughout our world behaving in a collaborative way.








Related Content

Increasing Productivity with Digitalization and AI
Job shops are implementing automation and digitalization into workflows to eliminate set up time and increase repeatability in production.
Read More
Setting Up the Building Blocks for a Digital Factory
Woodward Inc. spent over a year developing an API to connect machines to its digital factory. Caron Engineering’s MiConnect has cut most of this process while also granting the shop greater access to machine information.
Read More
Addressing Manufacturing Challenges with Automation
GrayMatter Robotics’ Physical AI robotic cells for manufacturing offer immediate impact and results.
Read More
3 Ways Artificial Intelligence Will Revolutionize Machine Shops
AI will become a tool to increase productivity in the same way that robotics has.
Read More